|
|

|

|
| e-Pub |
Section: New Results
Neuroprostheses and technology
Abstraction and composition for formal design of neuroprotheses
Participants : David Andreu, Hélène Leroux, Karen Godary-Dejean.
In the framework of specification and implementation of complex digital systems on FPGA, we have developed an approach based on components whose behavior and composition are specified by generalized interpreted T-time Petri nets (HILECOP). One of the inherent difficulties for designer is, on the behavioral part, to account for exceptions. This often leads to a complex modeling and is a source of human errors. Indeed, it is intricate to express all the possible situations (i.e. current state of model). We have defined a way to model exception handling by integrating the well-know concept of macroplace into the formalism. The analysability of the model and the efficiency of the implementation on FPGA (reactivity and surface, ie number of logic blocks) have been preserved. An example of macroplace is given in figure 13; it contains a sub-net (set of places of its refinement) from which exception handling is simply described by a dedicated output transition (transition te on fig. 13), whatever is the current state of the sub-net.
We also solved state evolution conflicts introducing (automatically) priorities between transitions, to avoid reaching inconsistent global state while synchronously executing the model.
The new formalism (including all improvements) has been defined [45] , as well as the model transformation based equivalent PNML generation for using existing analysis tools. The VHDL code generation has also been defined [59] .
All this work has been applied to an industrial example, that of a neural stimulator developed in collaboration with MXM industrial partner. Results have shown the significant contribution of the theoretical approach to the stimulation device reliability, while preserving both surface and power consumption of the given digital part of the device.
Ongoing work, developed through I. Merzoug PhD thesis, concerns the improvement of the analysis of synchronously implemented Petri nets.
New FES dedicated digital processor for neurostimulator
Participants : David Andreu, David Guiraud.
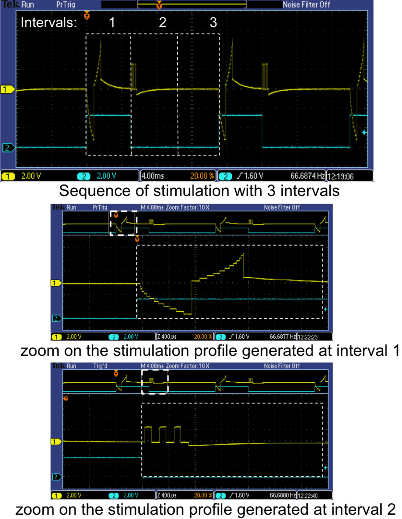
We designed (patent pending) and prototyped a new neural FES dedicated processor and its associated (more compact and efficient) set of instructions, as well as an embedded sequencer for accurate timing in sequencing stimulations to be performed (by the stimulator). The new neural stimulator is based on a dedicated ASIC (Application Specific Integrated Circuit), that is able to drive up to 24 channels of stimulation in absolute synchronization, and with a programmable and controlled current level distribution (patent pending). This ASIC also allows for impedance measurement. The functions of the stimulator are currently implemented in two separate chips: an analog stimulation front-end (ASIC) and a field-programmable gate array (FPGA) embedding the logic control. The FPGA embeds the new FES dedicated processor setting the output stage configuration (poles configuration and current ratio between them) and running potentially complex stimulation profiles (with a 1µs time step and 5 µA current step); example of generated stimulations are shown in Fig.16 . It also embeds the protocol stack allowing for remote programming and online control. Online control relies on advanced and efficient modulation mechanisms, e.g. coefficient based modulation preserving balanced stimulation.
And last but not least, it also embeds a monitoring module ensuring the respect of safety constraints stemming both from target tissue protection and electrode integrity preservation; this reference model based monitoring module ensures (configurable) current and quantity of injected charges limits and thus safe stimulation whatever are electrodes to be used (particularly for thin-film micro-electrodes). Safety limits must be defined by users (partners) according to the target and electrodes to be used.
Fast simulation of hybrid dynamical systems
Participants : Abir Ben Khaled [IFPEN] , Daniel Simon, Mongi Ben Gaid [IFPEN] .
When dealing with the design of complex systems, simulation is an indisputable step between concept design and prototype validation. Realistic simulations allow for the preliminary evaluation, tuning and possibly redesign of proposed solutions ahead of implementation, thus lowering the risks. To be confident in the result, building such simulations needs high fidelity models both for the components and for their interaction. Models of dynamical systems (as, for example, muscular fibers) are often given as a set of Ordinary Differential Equations (ODEs). However, the simulation of high-fidelity models is time consuming, and reaching real-time constraints is out of the capabilities of monotithic simulations running on single cores.
The aim of the on-going work is to speed up the numerical integration of hybrid dynamical systems, eventually until reaching a real-time execution, while keeping the integration errors inside controlled bounds. The basic approach consists in splitting the system into sub-models, which are integrated in parallel. I has been shown that an efficient partition must minimize the interactions between sub-models, in particular by confining discontinuities processing inside each component. Automatic partitioning, based on some particular incidence matrices of the original system, has been investigated to introduce a finely-grained co-simulation method enabling numerical integration speed-ups [14] . It is obtained using a partition across the model into loosely coupled sub-systems with sparse communication between modules. The proposed scheme leads to schedule a large number of operations with a wide range of execution times. A suitable off-line scheduling algorithm, based on the input/output dynamics of the models, is proposed to minimize the simulation errors induced by the parallel execution.The method was tested with an automotive engine model, but it is generic and can be applied to other systems of hybrid ODEs/DAEs, as are large sets of muscular fibers.
However, slack synchronization intervals may generate integration errors in the final result. Rather than using costly small integration and communication steps, an enhanced method uses context-based extrapolation is investigated to improve the trade-off between integration speed-ups, needing large communication steps, and simulation precision, needing frequent updates for the models inputs. the method uses extrapolations of the behavior of the models over the synchronization intervals. Test results on a hybrid dynamical engine model, based on FMI for model exchange, show that well chosen context-based extrapolation allows for significant speed-up of the simulation with negligible computing overheads [37] .
Control and scheduling co-design for stimulation systems
Participants : Daniel Simon, David Andreu, Samy Lafnoune [Master2 Robotique] .
In the FES distributed system developed by the team and marketed by Vivaltis, external electrodes are sticked on the body to either stimulate a muscle or to measure sensitive information (e.g., EMG). Each electrode is connected to a pod, which can be either a stimulation pod or a measurement pod. These Pods are controlled and coordinated by a controler through wireless radio-frequency (RF) links.
The communication frames between the controler and the pods use frames, each frame contains the receiver address and a code which correspond to the deired action. Simple communication stacks, based on the reduced OSI model, are implemented in each node of the wireless network, and the current version only provides static scheduling of the messages.
In fact static scheduling is not at all optimal when the generation of complex motions needs a tight coordination between several sensors and actuators over closed-loop controllers. The high sensitivity of the RF link with respect to varying networking loads and environment conditions calls for an adaptive scheduling of the messages via the regulation of a QoS criterion. The design of such feedback controllers wil rely on previous work [53] , [54] .
As any modification of the existing devices can be costly and as experiments involving livings cannot be done easily, a real-time simulation system has been design and implemented. The system includes continuous models of the muscular and skeleton systems, models of the wireless network, simplified communicaion stacks and control code running inside real-time threads. The system is open, running C code inside posix threads under Linux, so that the models can be progressively detailed and enriched when necessary [56] .